Bricolage: construire sa propre voiture Arduino
Pour ceux qui sont bricoleurs, il est possible de construire une voiture Arduino en utilisant plus ou moins les mêmes principes que précédemment sans disposer du châssis présenté plus haut.

Distance
entre roues : 13,5 cm – Largeur maximum du support : 14 cm – Longueur
du support : 23 cm
Matériel,
modules et composants supplémentaires utilisés pour la construction de la
voiture:

Nous
allons utiliser en association une carte ARDUINO UNO sur laquelle nous allons
brocher un bouclier pour moteurs L298P
avec buzzer incorporé
disposant
des connexions adéquates pour le branchement du servomoteur (direction) et des
deux moteurs


Moteurs
arrière avec équerres de fixation et roues fournies

Nous
modifions les roues avant avec l’utilisation de 2 petits roulements à bille par
roue pour les fixer sur la barre de direction








-
Une carte Arduino UNO R3 ou similaire
- Un
« bouclier » de moteurs L298P avec buzzer intégré et connexions
spécifiques pour le servomoteur et les deux moteurs
-
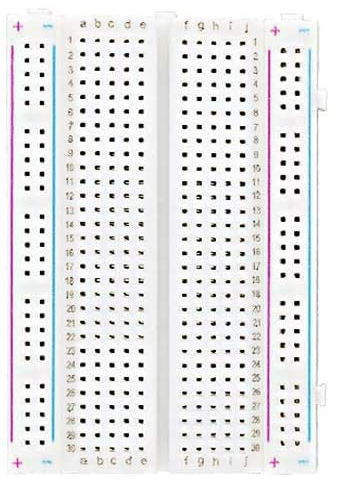
Un quart de plaque de connexions pour placer le module Bluetooth HC-05 et le
petit bouton de test
-
Un module Bluetooth HC-05
-
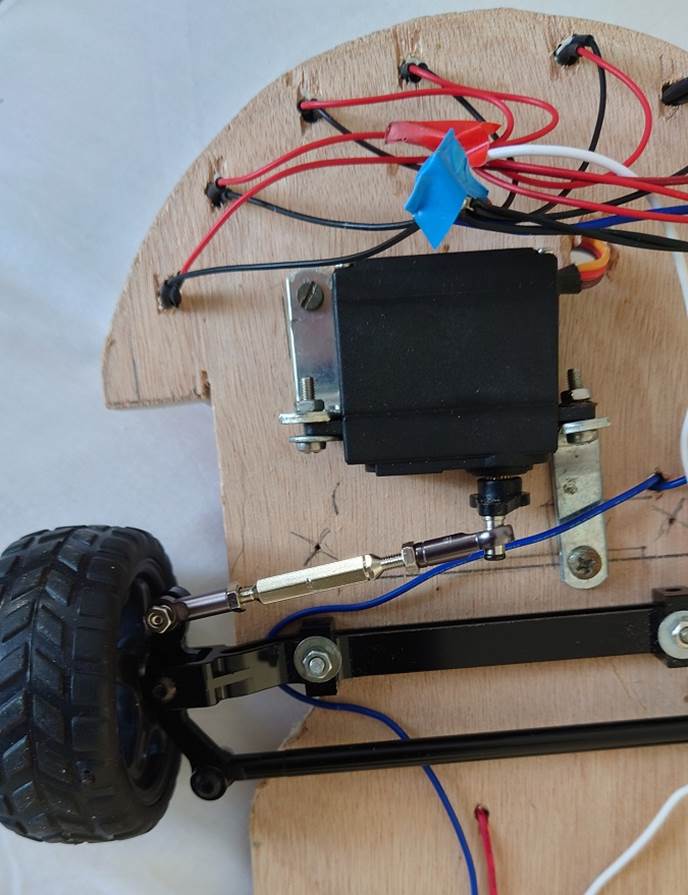
Un servomoteur MG 996R avec câbles et accessoires (bras et vis) pour contrôler
la direction avant (Nous le fixons sous la planche utilisée comme socle en
avant de la barre de direction)
-
Deux moteurs pour assurer la transmission des roues arrière
-
Quatre roues
Les 2 roues avant seront
inversées, percées et modifiées avec deux mini-roulements qui vont s'emboîter
sur les axes de la barre de direction.
Ecrous et rondelles adaptées sont à prévoir.
Les roues arrière sont fixées
avec des supports en laiton hexagonaux fournis avec les moteurs et une vis
extérieure.
- 4
mini-roulements à bille 5 X 11 X 4 mm (2 par roue avant)
-
Barre de direction complète prééquipée (écartement des roues de 14 cm)
- Une biellette de
direction
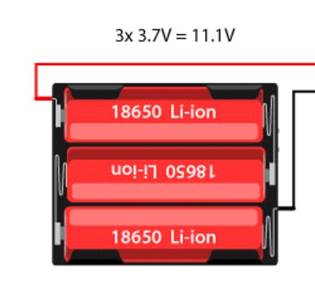
- Un support pour3
batteries au lithium 18650 Li-ion
-
Trois batteries rechargeables Li-Ion 18650 de 3,7 volts chacune
-
Un interrupteur général
- 3
résistances de 1KΩ, 1 résistance de 220 Ω, 1 LED bleue, des LEDs blanches pour placer à
l'avant, des diodes rouges pour placer à l'arrière
-
Câbles de couleur, jumpers pour les diverses connexions entre tous ces éléments
- Le support sera découpé dans une plaque de contre-plaqué de 1 cm d'épaisseur

Prévoir un écartement de 14 cm entre les roues avant
et donc les roues arrière pour découper votre planche-support en conséquence

Une biellette sera
fixée entre le servomoteur et la barre de direction
Le programme Arduino B4R sera légèrement modifié puisque nous gérons désormais 2 moteurs arrière au lieu d'un seul mais le scénario reste le même et donc l'application B4A sur Smartphone reste exactement la même que précédemment avec la voiture avec châssis équipé.
Le bouton de test provoquera
exactement les mêmes résultats:
- Les roues avant vont se braquer vers la droite puis vers la
gauche avant de s'aligne en ligne droite
- Le véhicule va avancer pendant 3 secondes puis reculer pendant 3
secondes
- De nouveau, les feux et le Klaxon vont s'allumer puis s'éteindre
3 fois
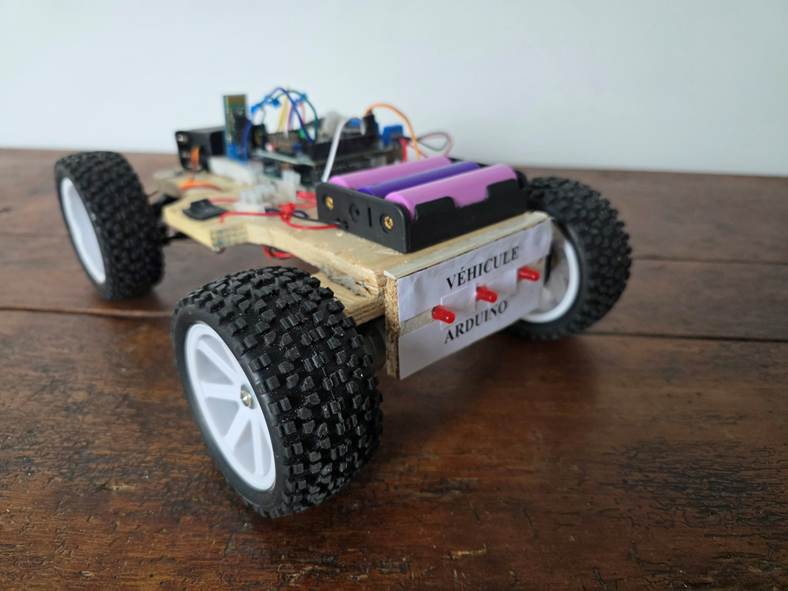
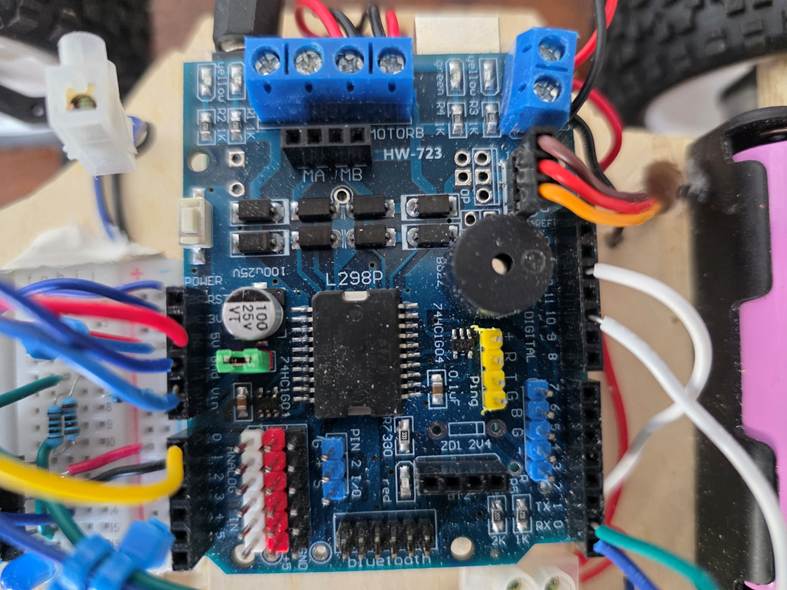
Prototype issu du bricolage, en état de fonctionner
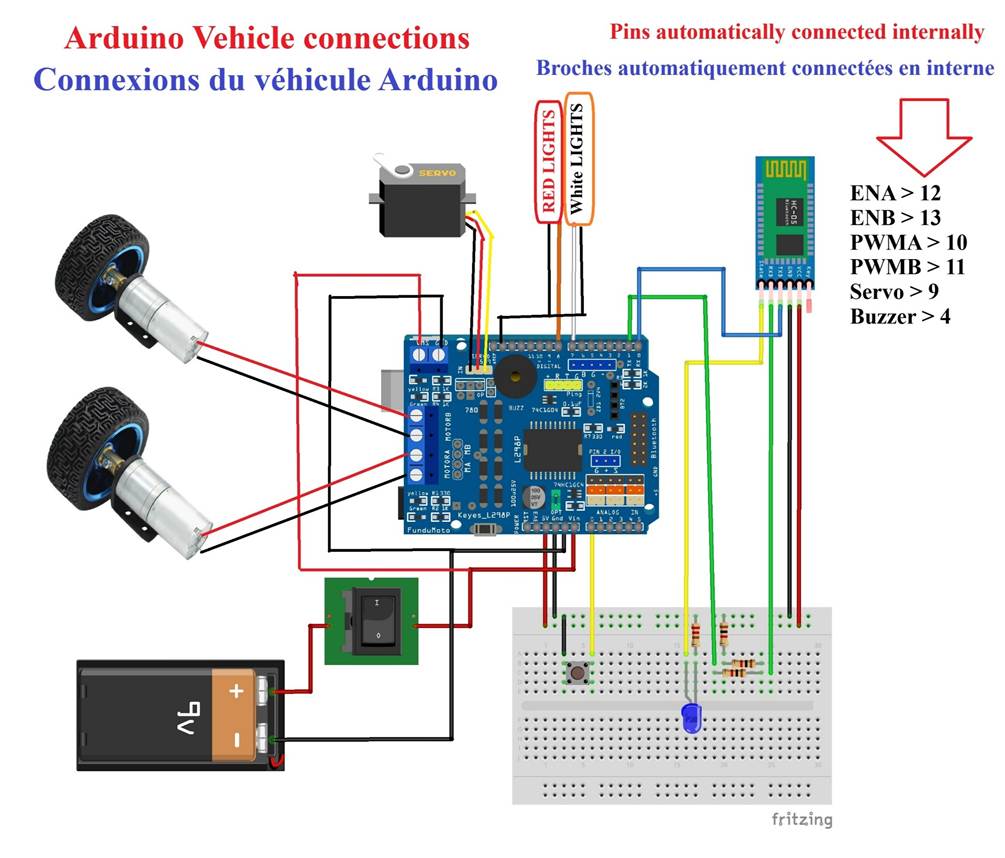
Schéma général des connexions entre les divers composants du véhicule Arduino
Vidéo >>> TESTS bouton jaune et pilotage Bluetooth
Lien de téléchargement >>>
Téléchargement
du programme adapté Arduino B4R
Rappelons que l'application B4A sur Smartphone n’a pas changé >>> Application Android B4A