Construire et piloter une voiture Arduino
Build and pilot an ARDUINO car
1 - Montage du châssis
Chassis assembly

Se procurer le kit Arduino fabriqué en Chine et souvent
fourni sans notice de montage:
Obtaining the Arduino kit, made in China and often supplied without assembly instructions:
>>> https://www.elecrow.com/4wd-smart-car-robot-chassis-for-arduino-servo-steering.html
>>>
Ali
Express.com
Compter entre 30 et 50 € environ selon le fournisseur - Expect to pay between €30 and €50 depending on the supplier.
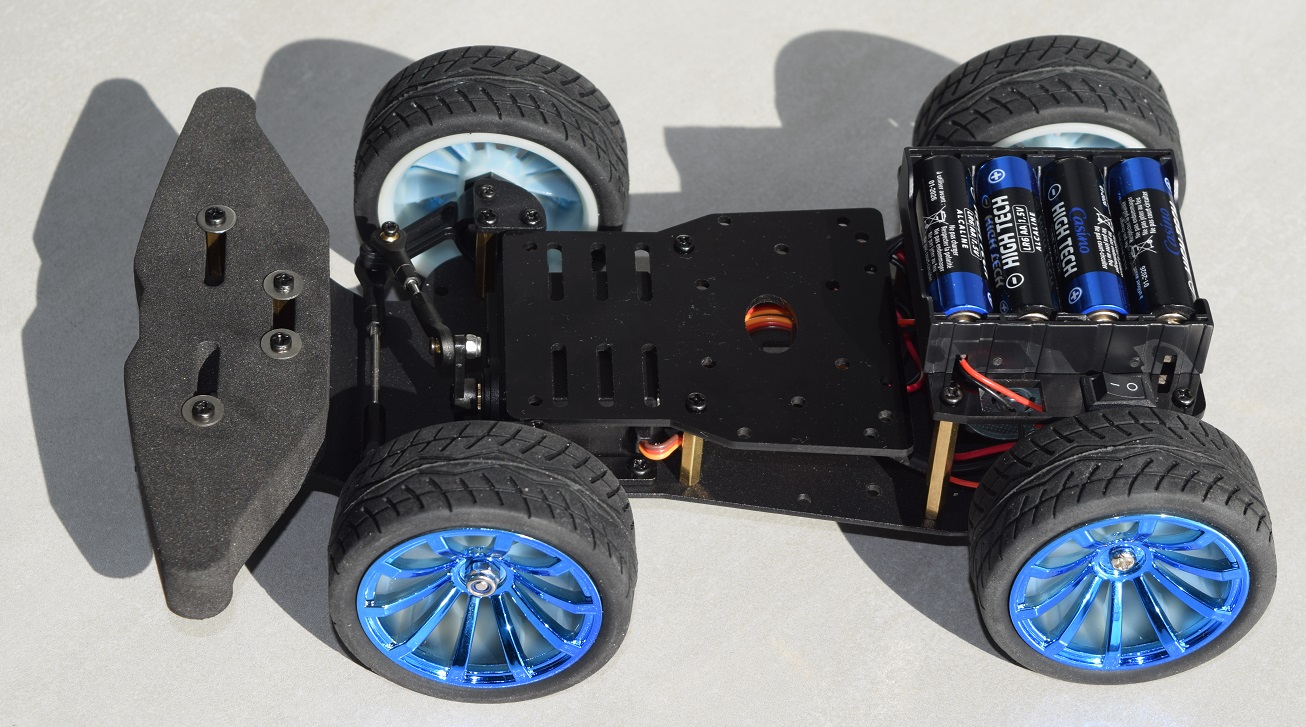
Il
s’agit d’une voiture classique à propulsion arrière avec deux roues motrices
dont le moteur est fourni et une direction avant commandée par un servomoteur
fourni également.
This is a classic
rear-wheel drive car with two drive wheels, including a supplied motor and front steering controlled by a supplied servo motor.
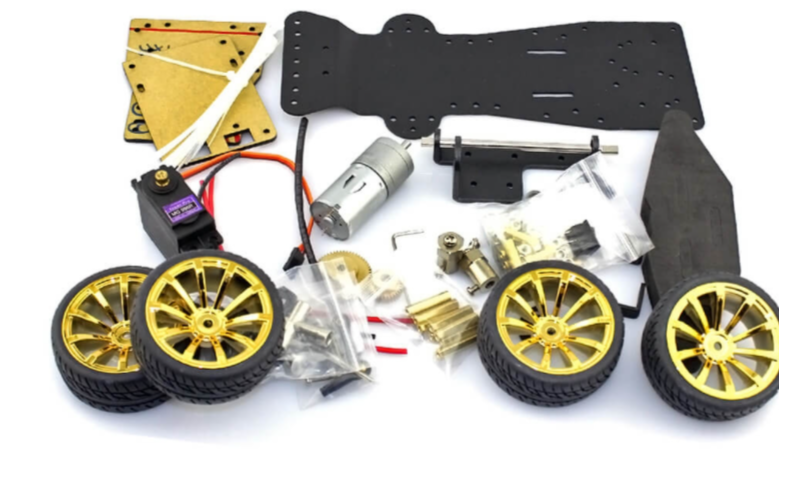
Châssis métallique pré-percé, 2
plaques en résine, moteur et engrenages pour les roues arrière motrices,
servomoteur pour contrôler la direction avant, visserie, roulements,
accessoires divers ...
Pre-drilled metal chassis,
2 resin plates, motor and gears for the rear drive wheels, servo motor for controlling the front steering, screws, bearings, various accessories...
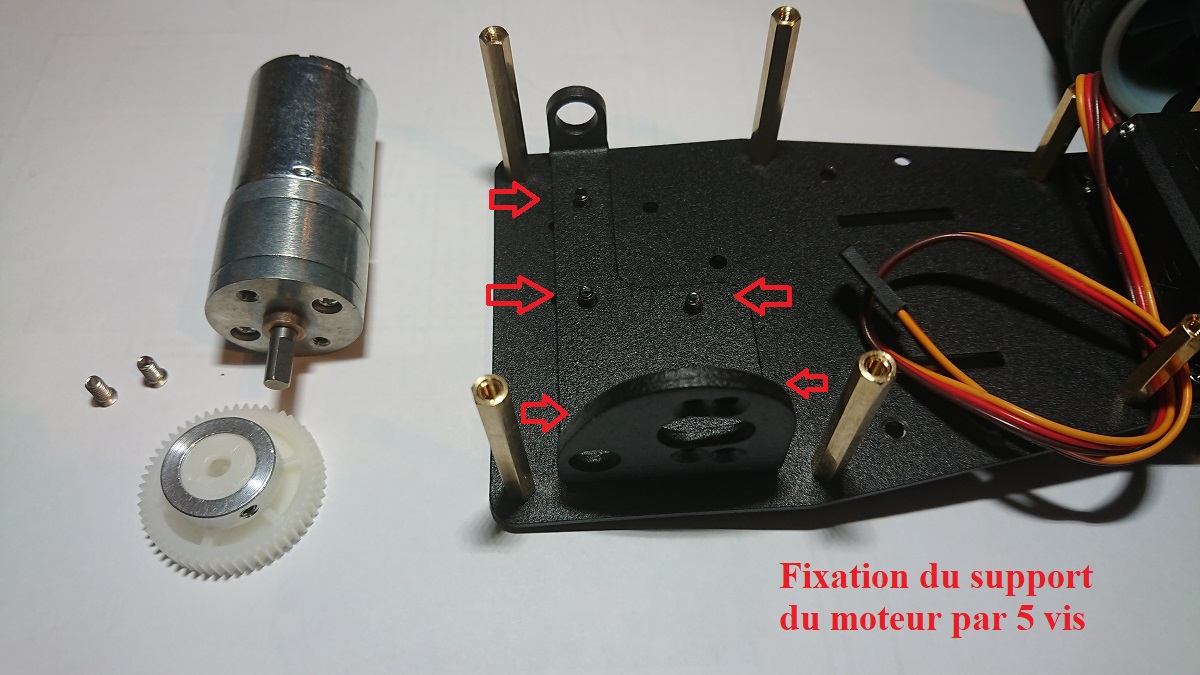
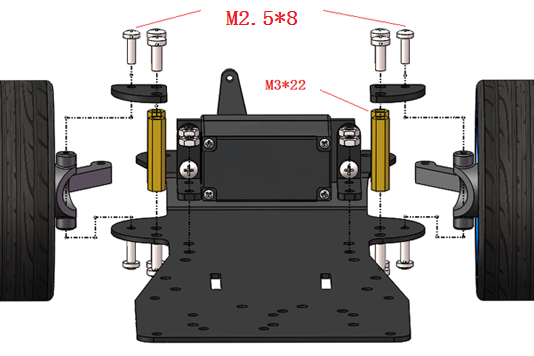
Fixer
solidement le support du moteur et des roues arrière à l'aide de 5 vis
Securely attach the
engine and rear wheel bracket using 5 screws
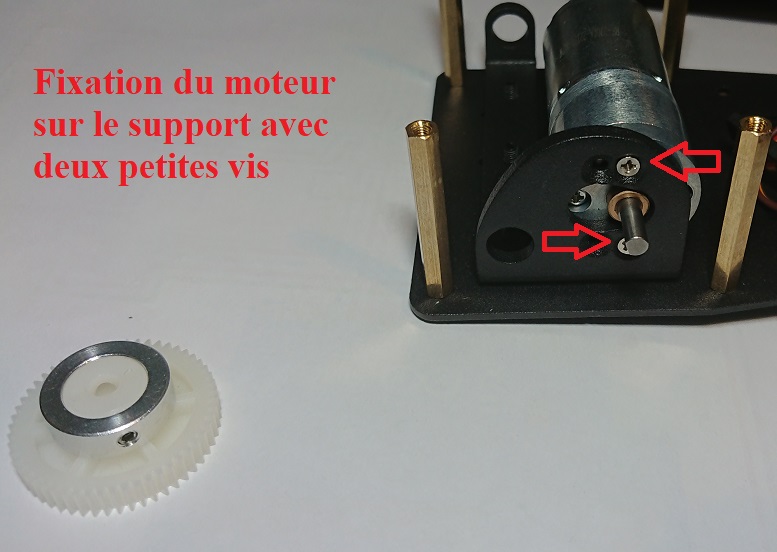
Fixer
le pignon à la sortie de l'axe moteur à l'aide de 2 vis encastrées, attention à
placer la zone plate de l'axe face à l'une des vis
Secure the pinion to the motor shaft output using 2 countersunk screws, making sure to position
the flat area of the shaft facing one of the screws.

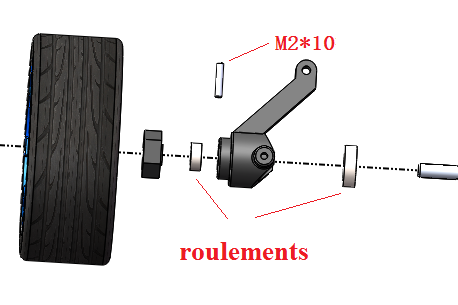
Préparer
les pièces composant le train arrière de la voiture
Prepare the parts that
make up the rear axle of the car
Placer
l'axe arrière ainsi sans oublier les deux petits roulements qui s'emboîtent
dans le support, fixer solidement le petit pignon à l'aide des vis encastrées
Position the rear axle
as shown, remembering the two small bearings
that fit into the support,
and securely fix the small pinion using the recessed screws.
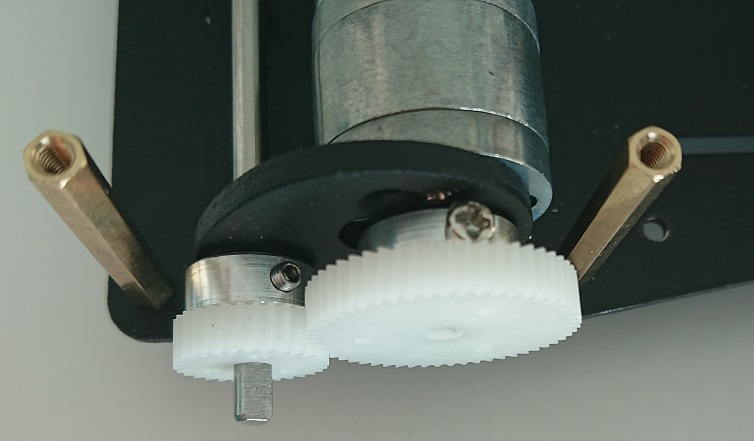
Attention, les deux pignons peuvent être
installés dans les deux sens mais le serrage par les vis n'est efficace que
dans le sens ci-dessus
Note that the two
sprockets can be installed in either direction,
but tightening with the screws is only
effective in the direction shown above.
(En
effet, surtout en ce qui concerne le gros pignon de sortie moteur, il est
impossible de serrer correctement les vis si on inverse son sens de montage sur
l'axe, les vis n'atteignent pas l'axe qui tourne dans le vide sans entraîner
les roues arrière !)
(Indeed,
especially with regard to
the large motor output pinion,
it is impossible to properly tighten the screws if its mounting
direction on the shaft is reversed; the screws do not reach the shaft, which spins freely without driving the rear wheels!)
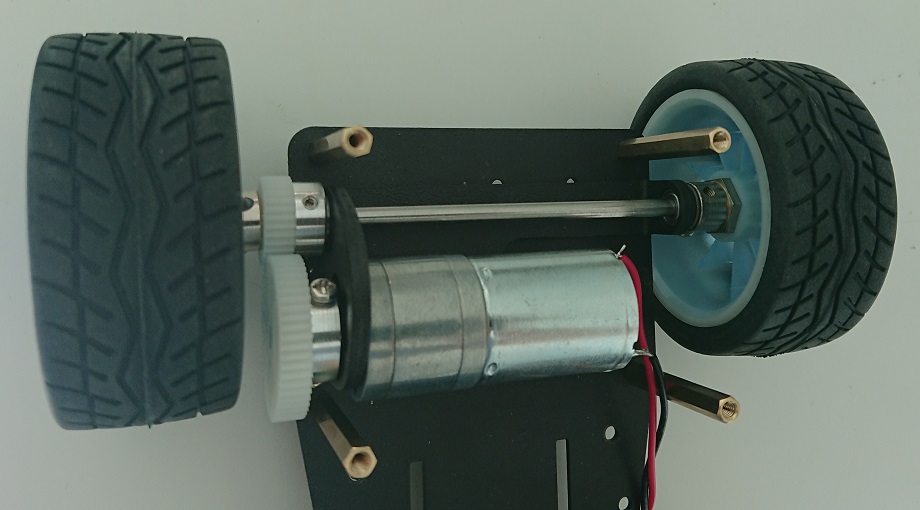
Mettre les roues arrière en place - Put the rear wheels in place
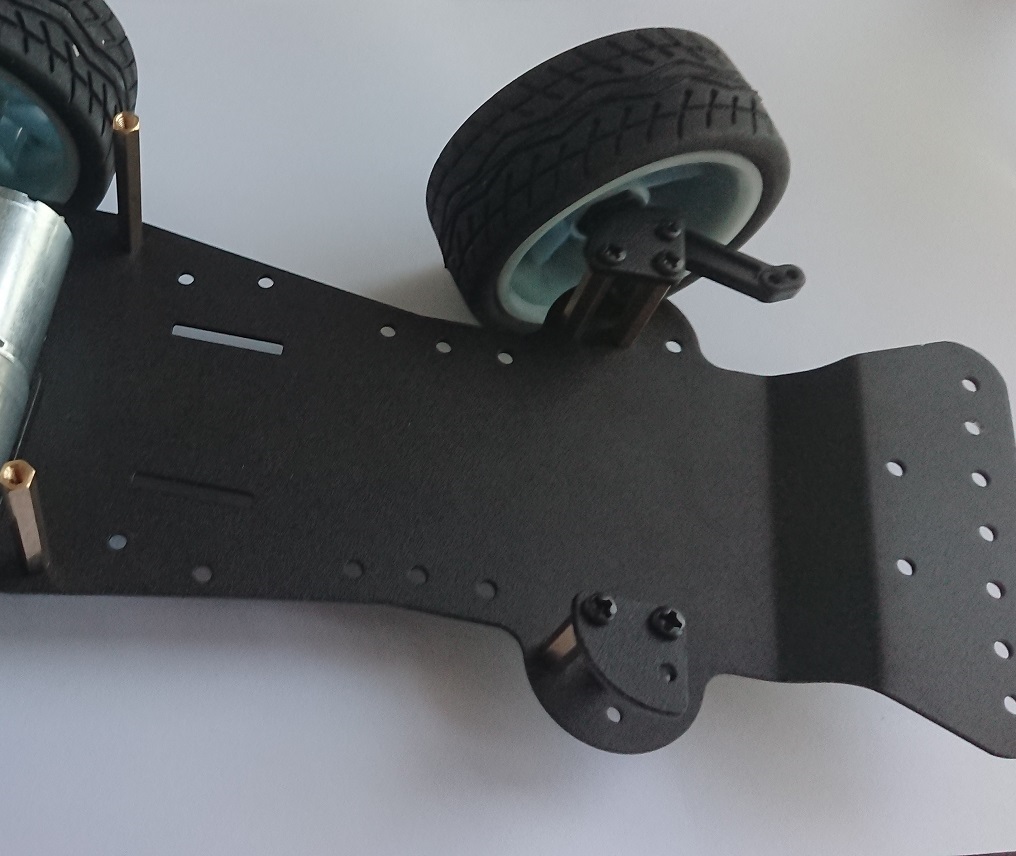
Préparer
les supports pour les roues avant et le système de direction
Prepare the supports for the front wheels and the steering system
Détails du montage du train de roues avant - Details of the front wheel assembly
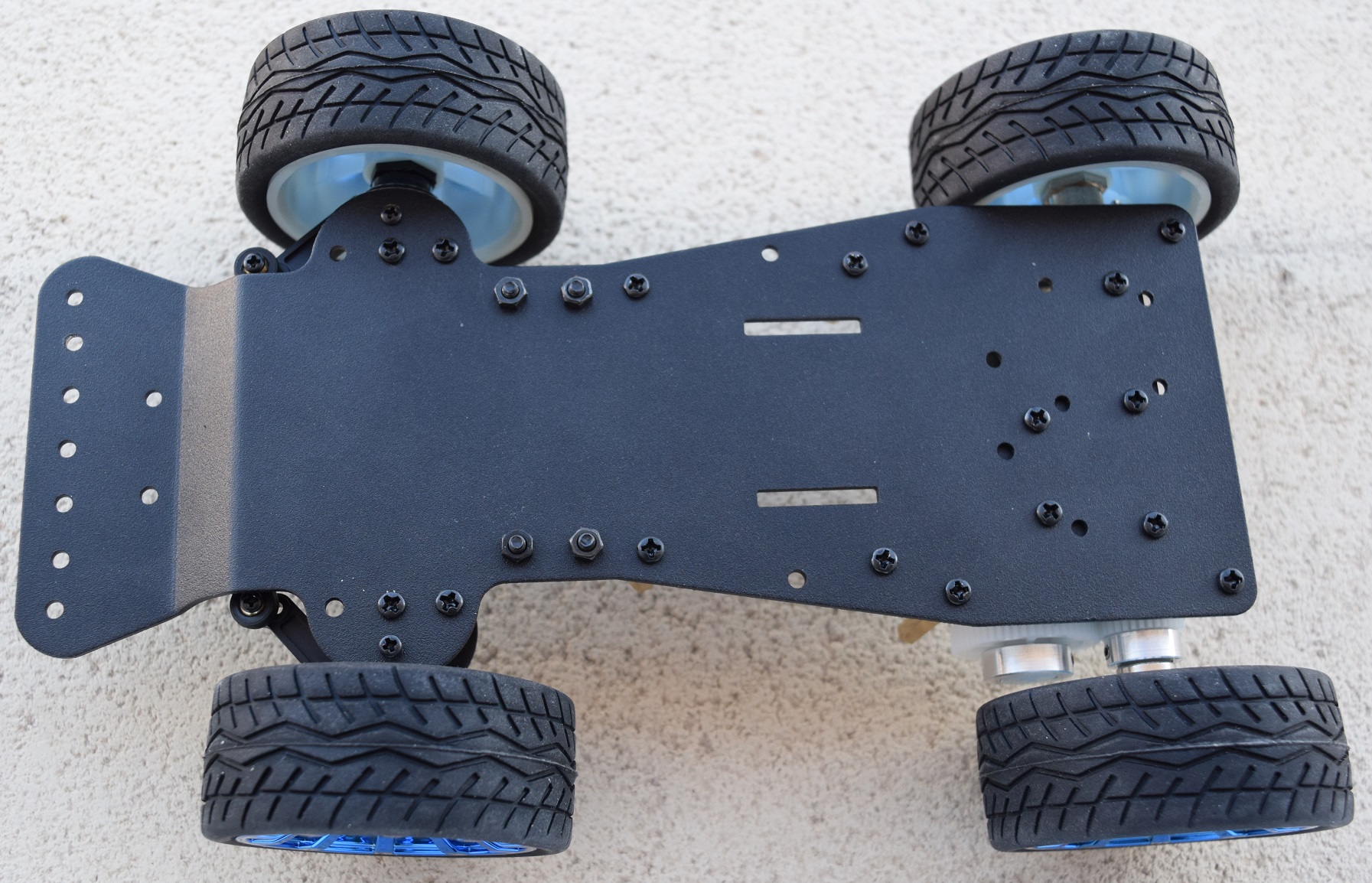
Châssis retourné avec les fixations vissées Chassis turned upside down with the screw fixings
Pièces
utilisées pour le système de fixation des roues avant
Parts used for the front wheel mounting system


Support roue avant et détails Front wheel support and details
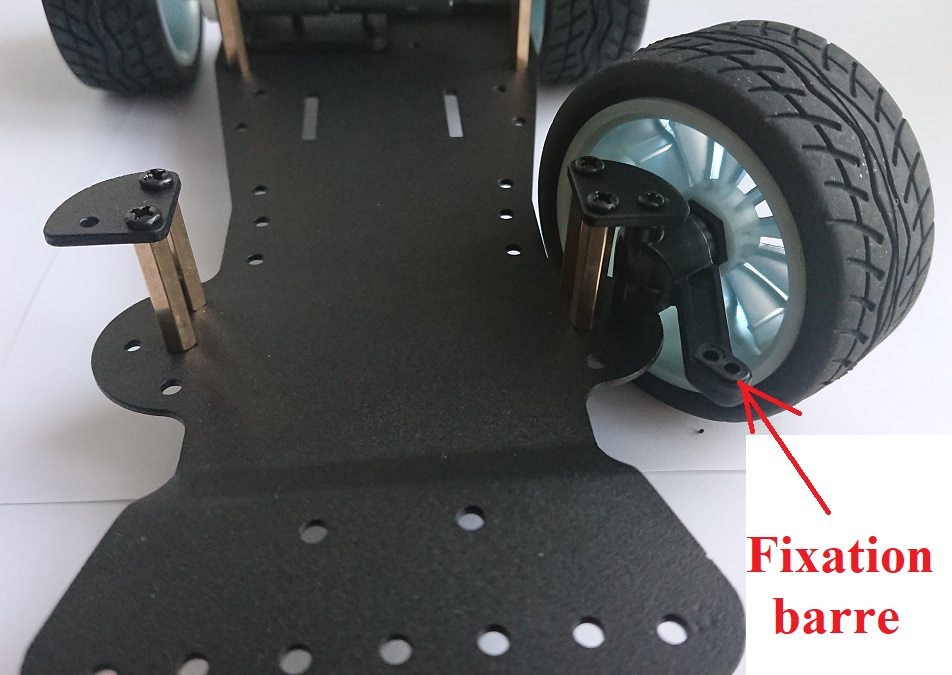
Trou de fixation de la future barre de direction Mounting hole for the future steering bar

Roues
avant placées et reliées par une barre de direction à écartement réglable par
vissage
Front wheels positioned
and connected by a steering
bar with adjustable spacing via screws
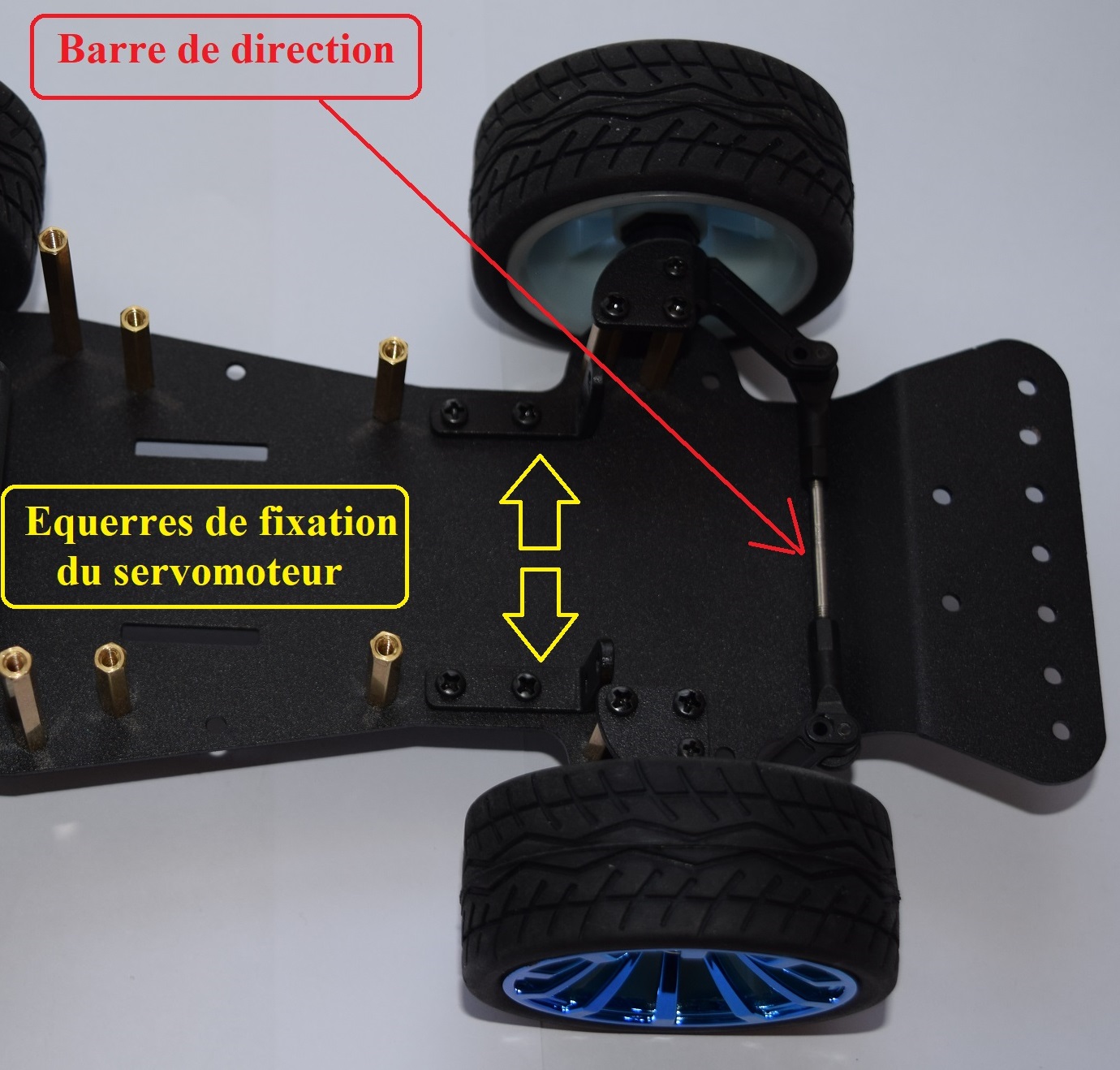
Équerres
destinées à fixer solidement le servomoteur
Brackets designed to securely fix the servomotor
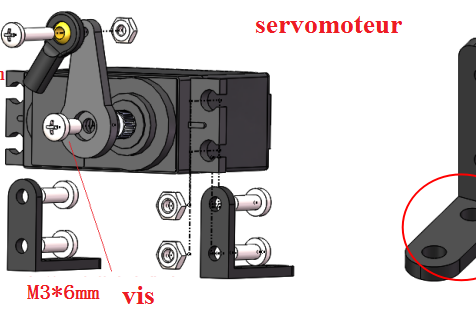
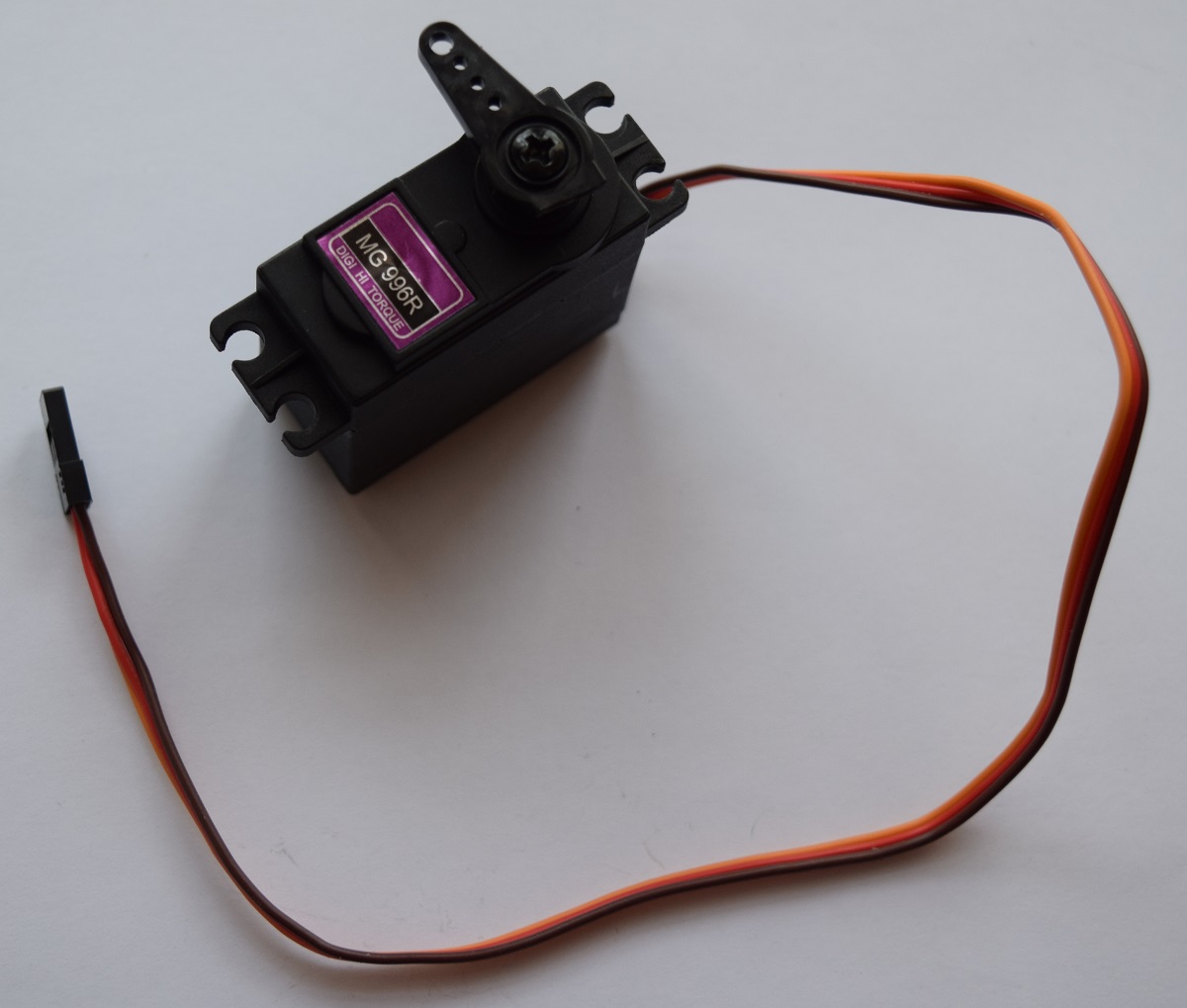
Servomoteur
avant le montage sur le châssis
Servomotor before mounting on the chassis
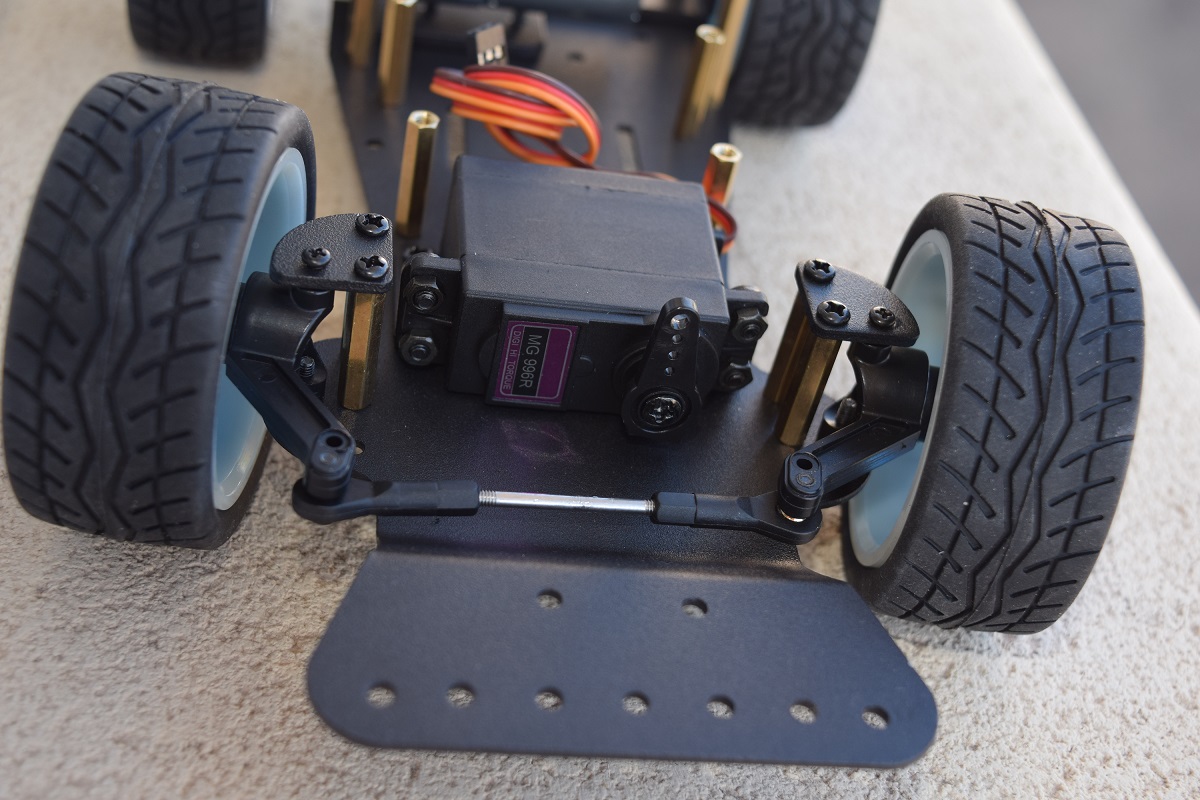
Servomoteur
solidement vissé sur les deux équerres
The servomotor is
securely screwed onto the two brackets.
Il
faut positionner le bras mobile à mi-chemin de la course du moteur avant de le
visser solidement !
Il
doit pouvoir tourner approximativement de 90° à gauche et de 90° à droite.
The
movable arm must be positioned halfway through the motor's travel before being
securely screwed in!
It should be
able to rotate approximately
90° to the left and 90° to the right.

Servomoteur
mis en place et vissé sur les deux petites équerres métalliques
The servo motor was
installed and screwed onto
the two small metal brackets.
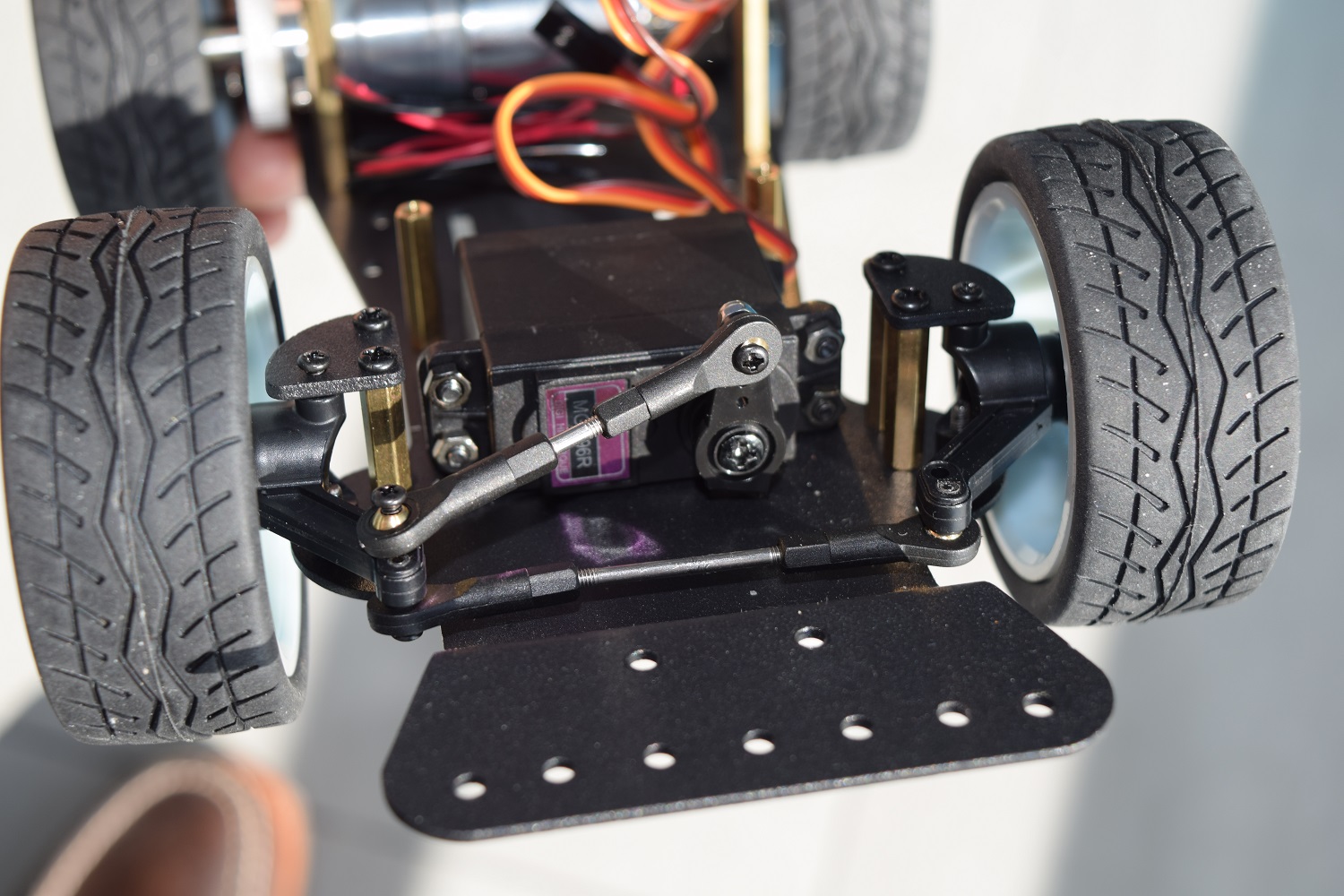
Pose
de biellette réglable reliant le bras du servomoteur à la barre de direction
Installation of an adjustable connecting rod linking the servo motor arm to
the steering rod
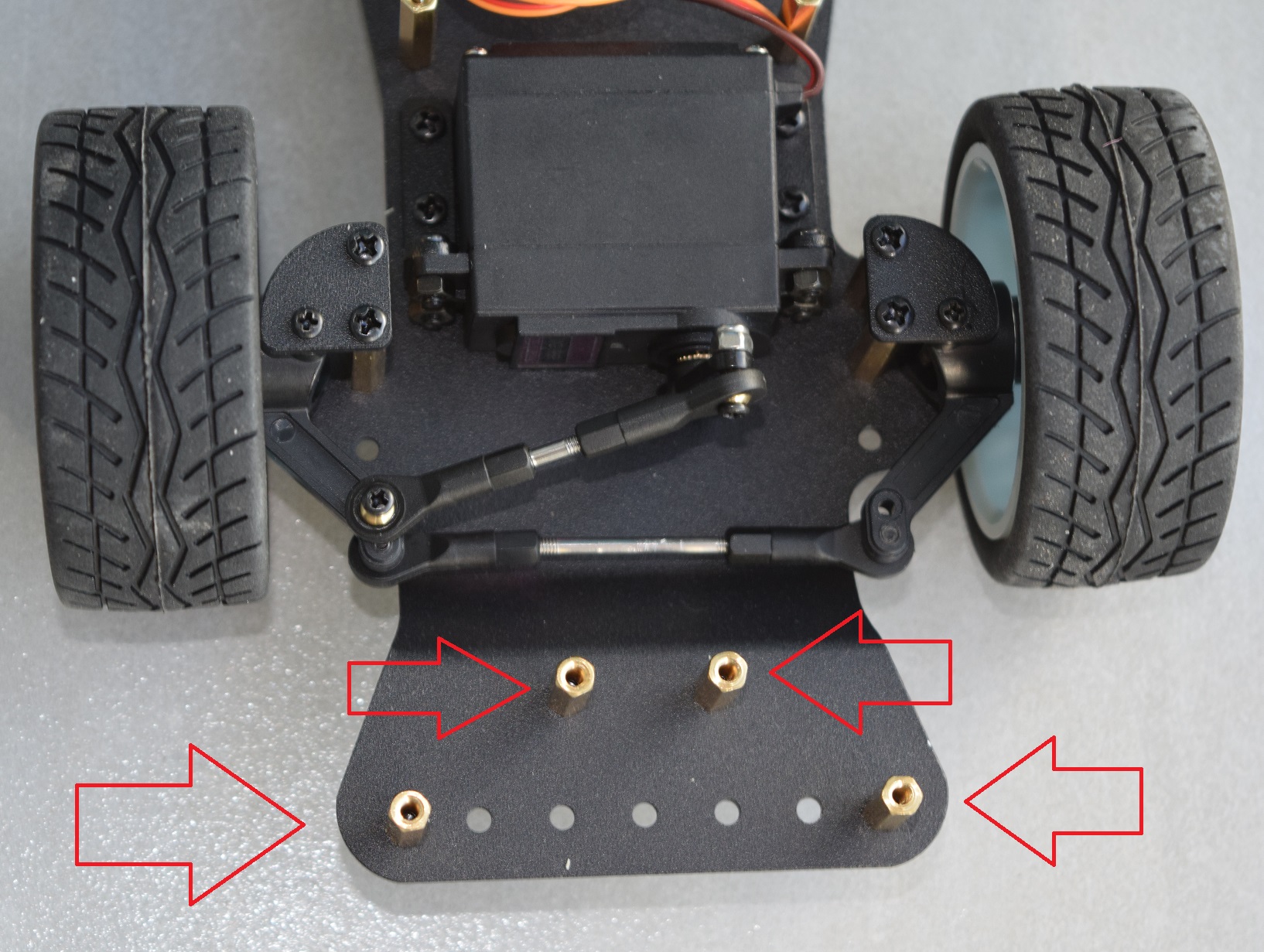
Préparation
de la fixation du bouclier avant Preparing the front shield attachment
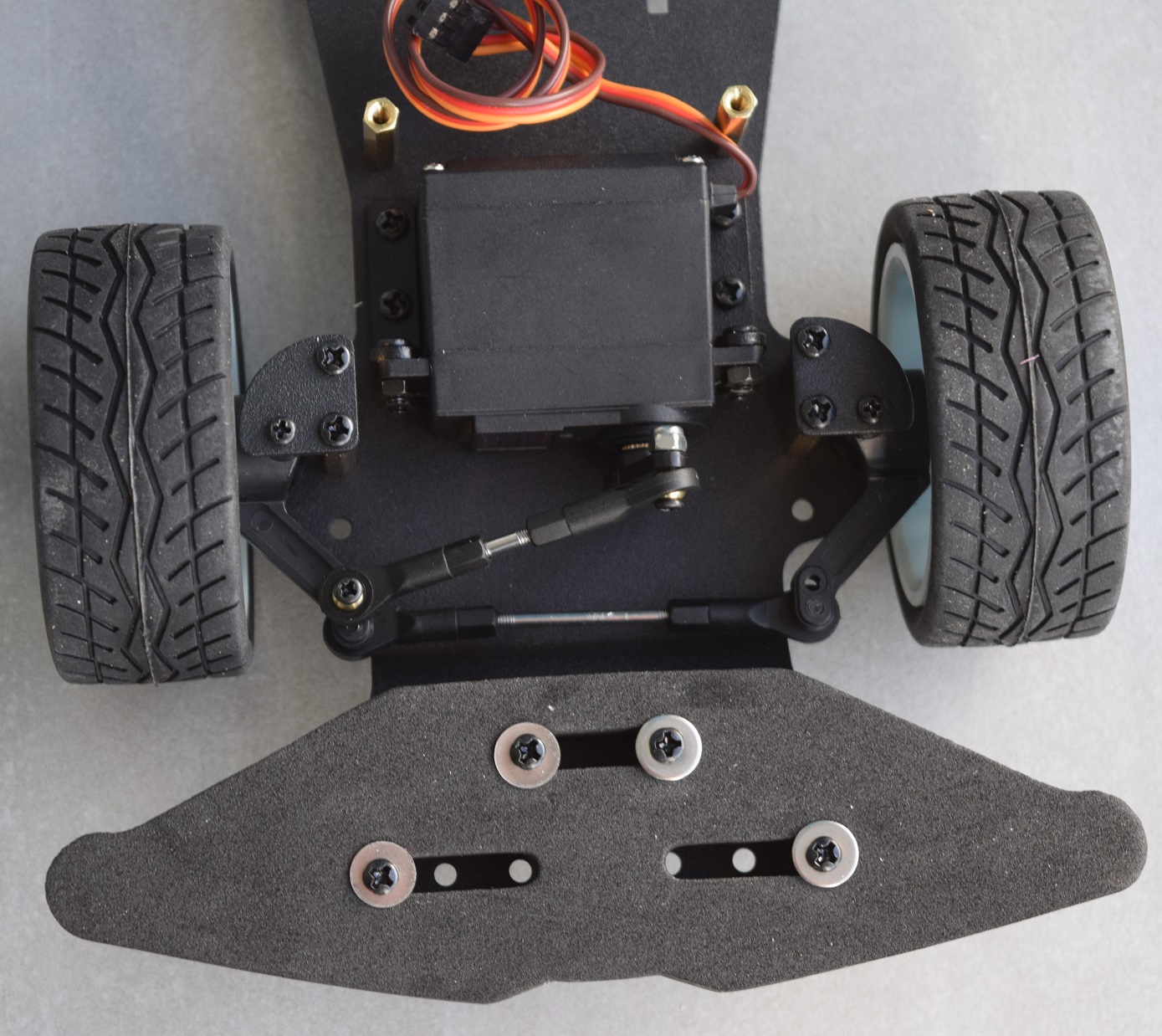
Bouclier
avant mis en place Front shield installed
Pose
des deux plaques en résine et du petit interrupteur général sur la plaque
arrière
Installation of the two resin plates and the small main
switch on the back panel
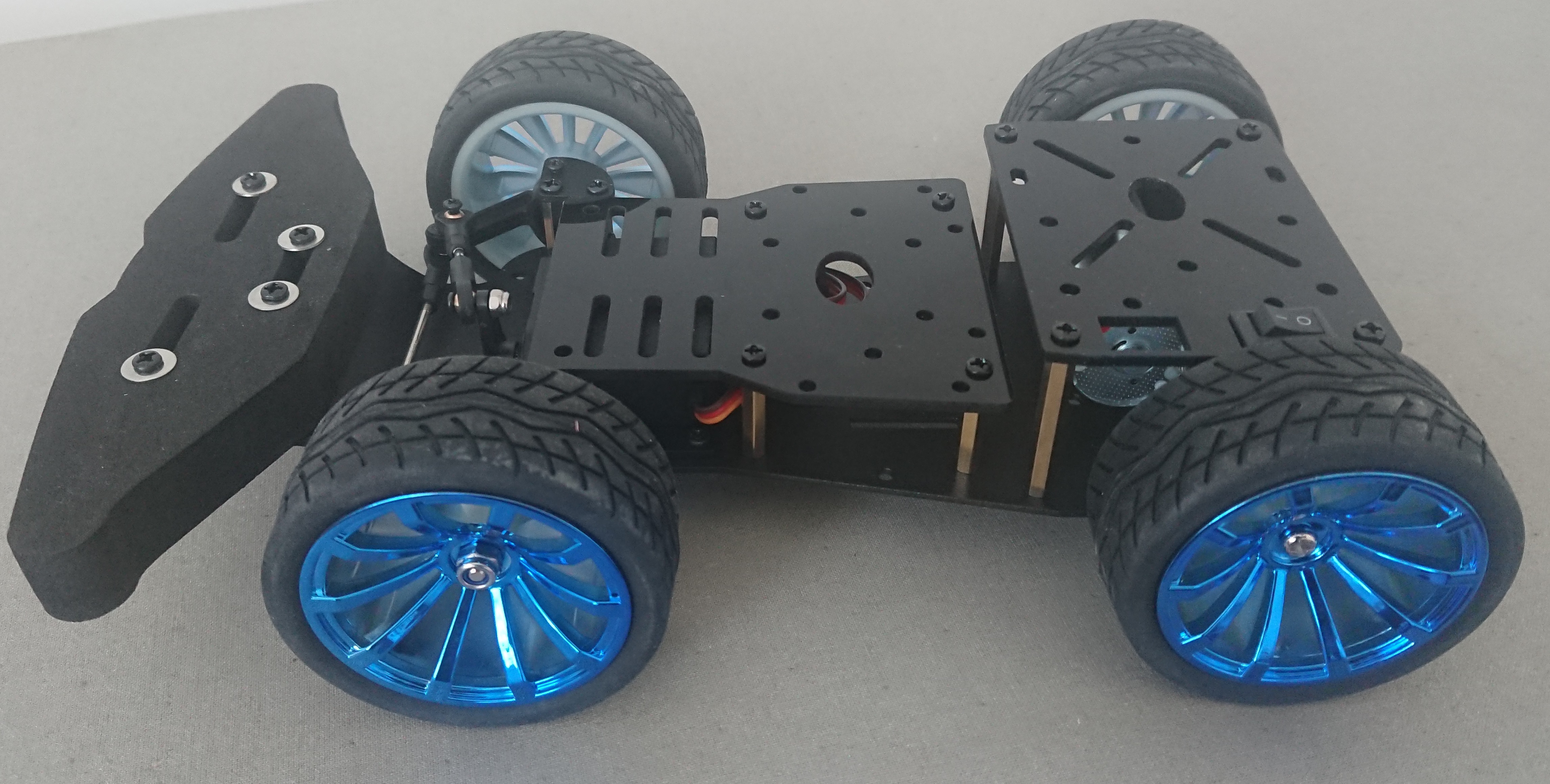
La partie "Montage du
châssis" est terminée. Nous allons pouvoir passer à l'étape suivante: ajouter
les composants électroniques qui vont nous permettre de faire fonctionner
puis de piloter cette voiture à distance.
The "Chassis Assembly" section is complete. We can now move on to the next step: adding the electronic components that will allow us to operate and then remotely control this car.
Continuer
Continue >>> Équipement
électronique de la voiture Arduino
Arduino car electronics
Retour HAUT Page Retour Menu ARDUINO
Back to Top Page Back to
ARDUINO Menu