Bluetooth scooter
Video First test
Video Motors
test button
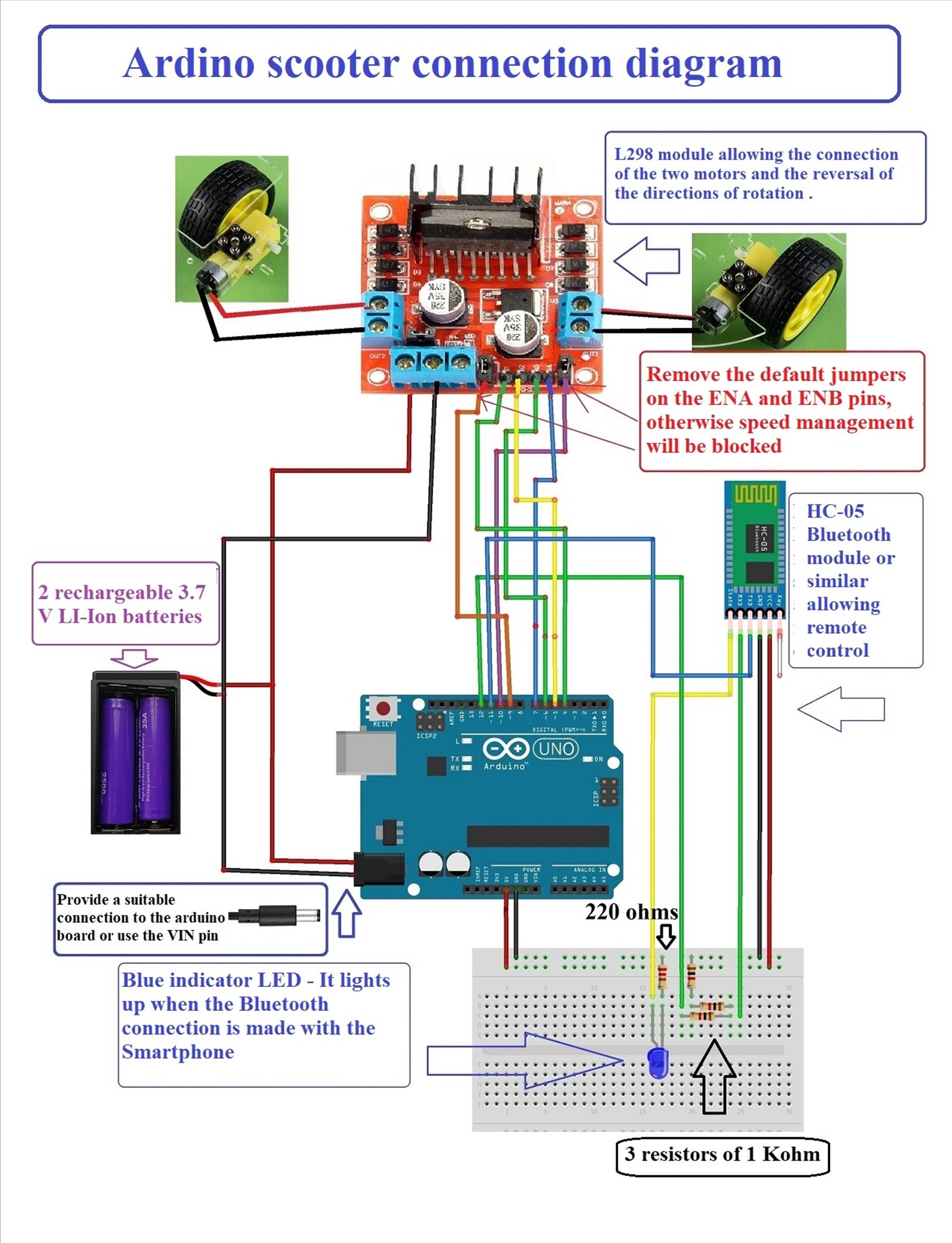
Materials: An Arduino Uno card, a
quarter of a quick connection plate, an HC-05 Bluetooth module, an L298N Shield
module, a 5.5 x 2.5 male plug for powering the Arduino card, a few white LEDs
for the front lights, 2 pre-wired red diodes for the rear lights, a buzzer
which will serve as a horn, 2 3.7 volt LI-ION rechargeable batteries and their
storage box with cover, 1 small central switch, 3 resistors of 1 Kohm, 1
resistor of 220 ohms, 1 blue LED, cables and jumpers for connections, an
Android Smartphone with the Bluetooth system (or a Joystick Shield card with a
second HC-05 Bluetooth module).






Spare parts before
assembling the “tricycle” - Note that we are only using half of the
half-connection plate, i.e. a quarter of the plate.
(Tip: Carefully saw this plate
in half with a fine hacksaw so as not to damage the embedded metal
connectors.)
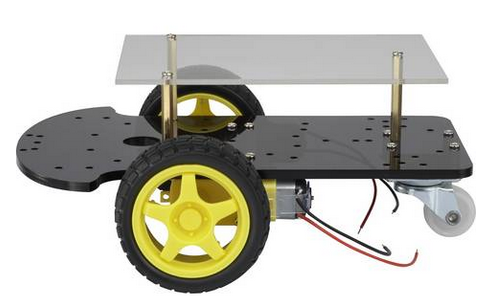

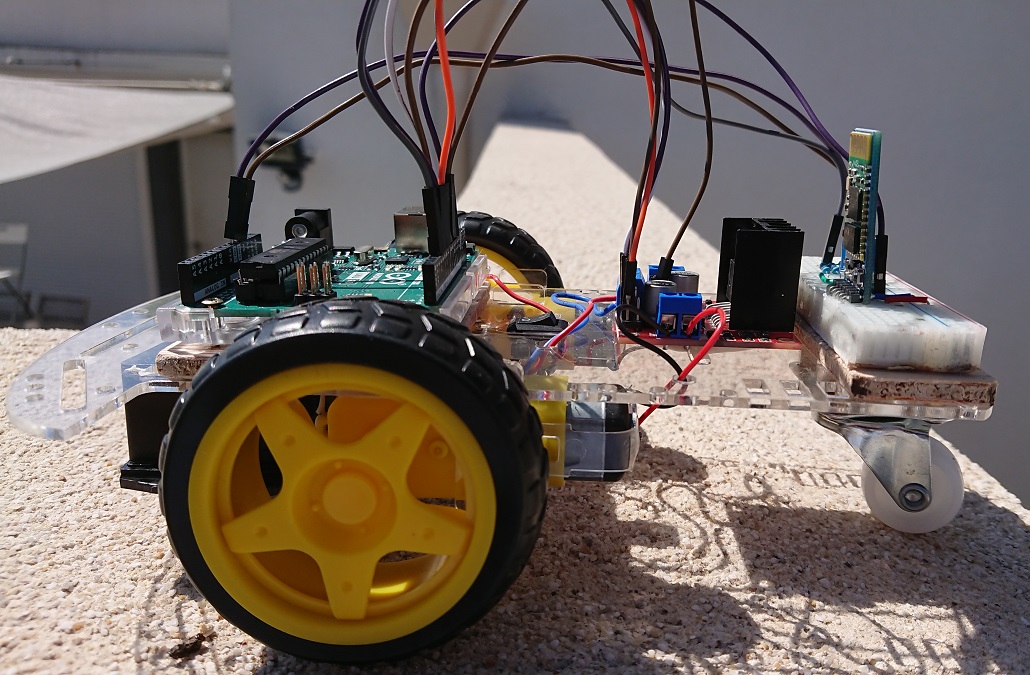
Scooter chassis
assembled with their two engines
These two models
are easily found in specialized online stores, the model on the left is more
solid and the motors are pre-wired
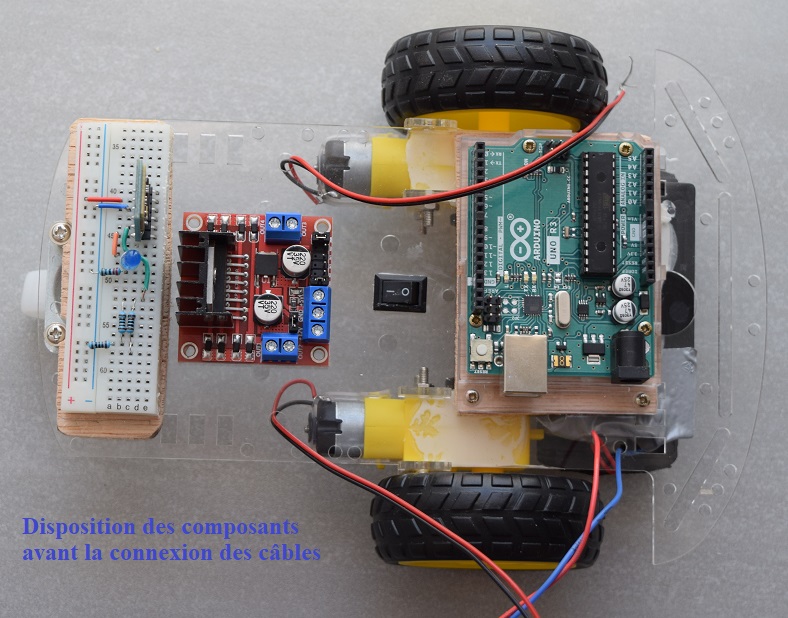
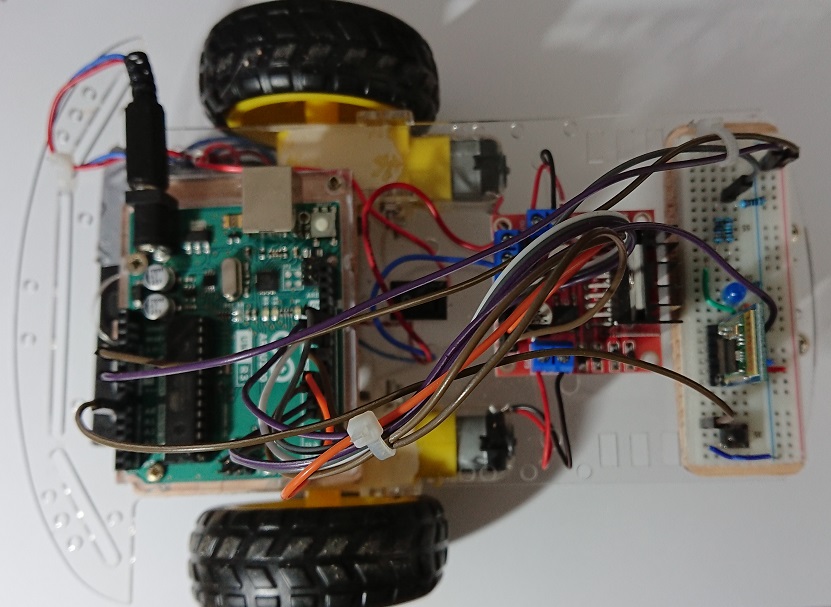
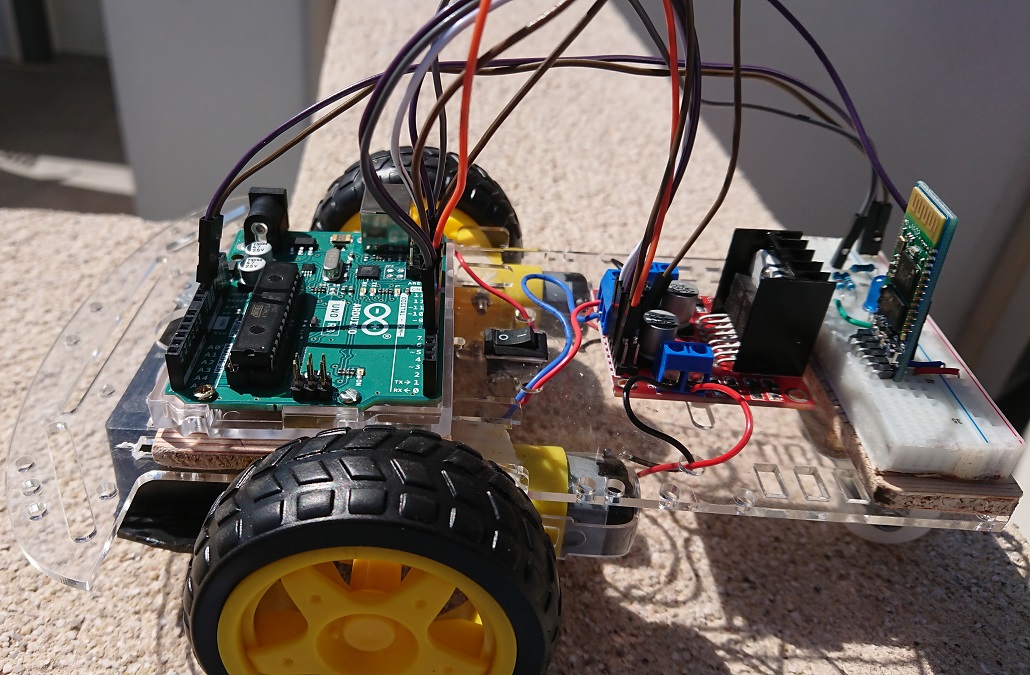
Components
installed on the chassis: from left to right > Quarter breadboard with HC-05
Bluetooth module, L298N module, main switch, Arduino Uno card
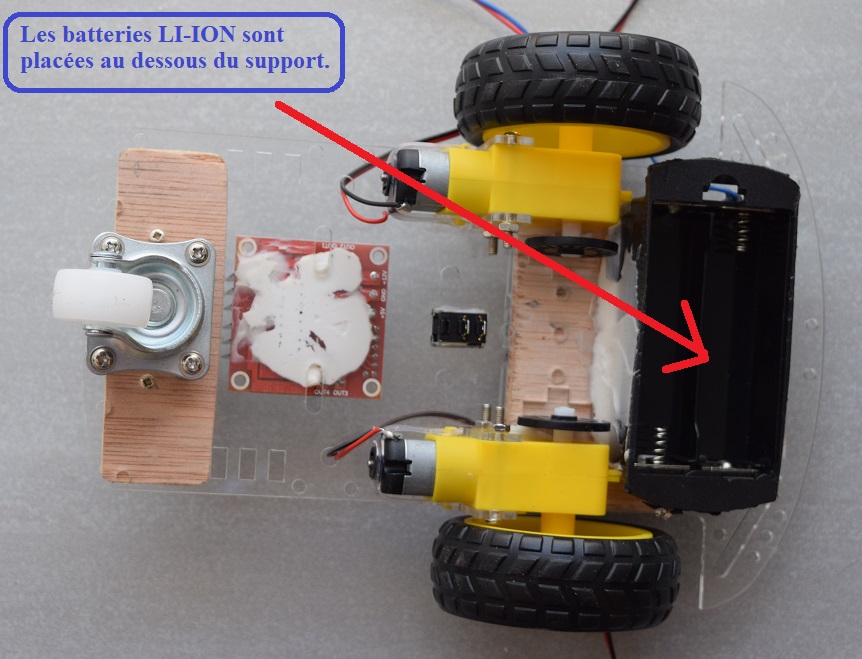
View of the scooter
upside down with the Li-ION battery storage box placed below the support
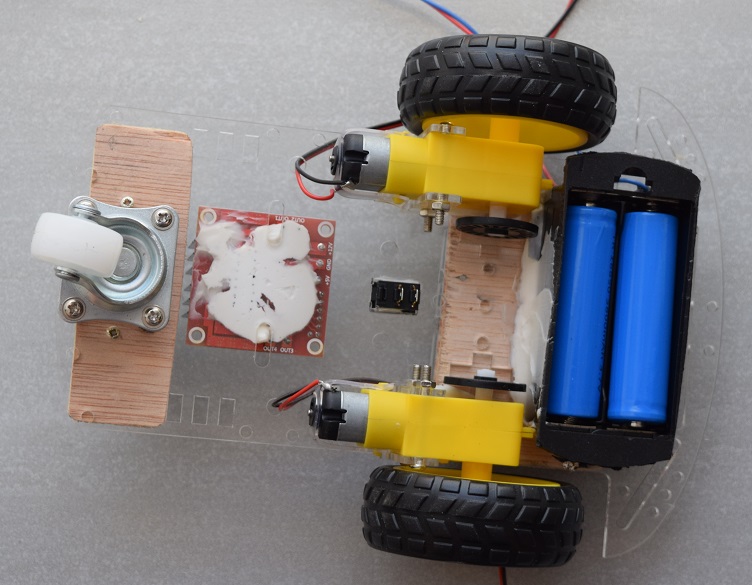
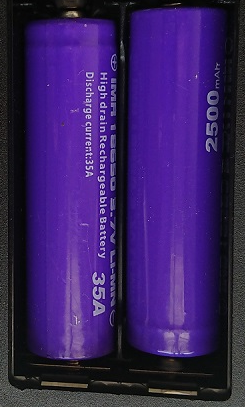
Batteries installed
before closing the lid
HC-05 Bluetooth
module plugged into a quarter of a breadboard at the back
Connecting motors, modules and the Arduino Uno board
A small, easily
accessible central switch allows you to turn on the scooter
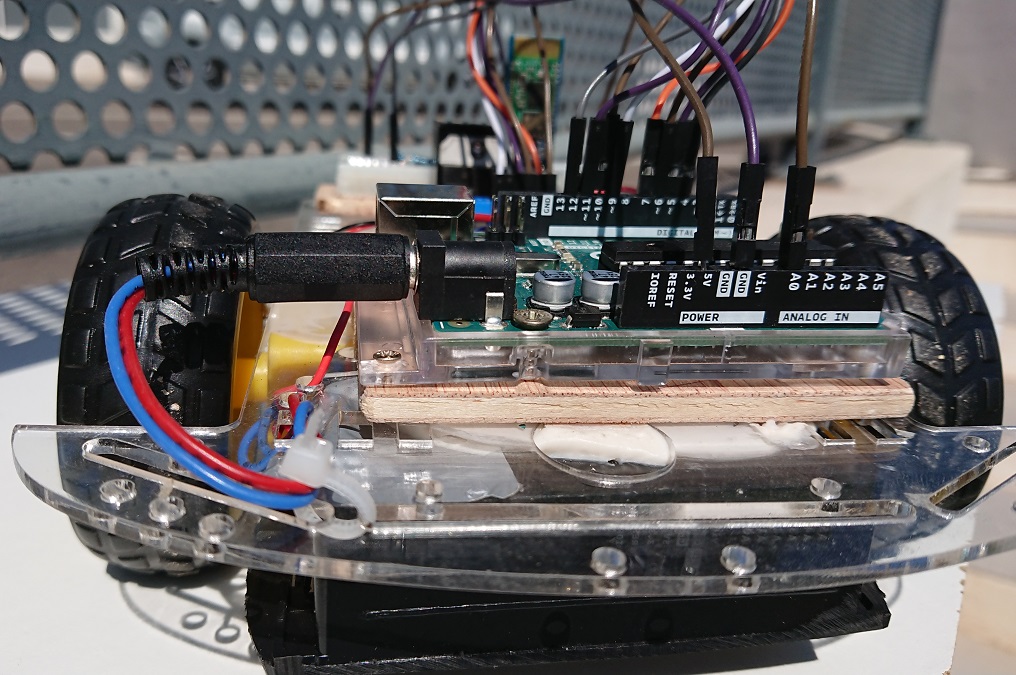
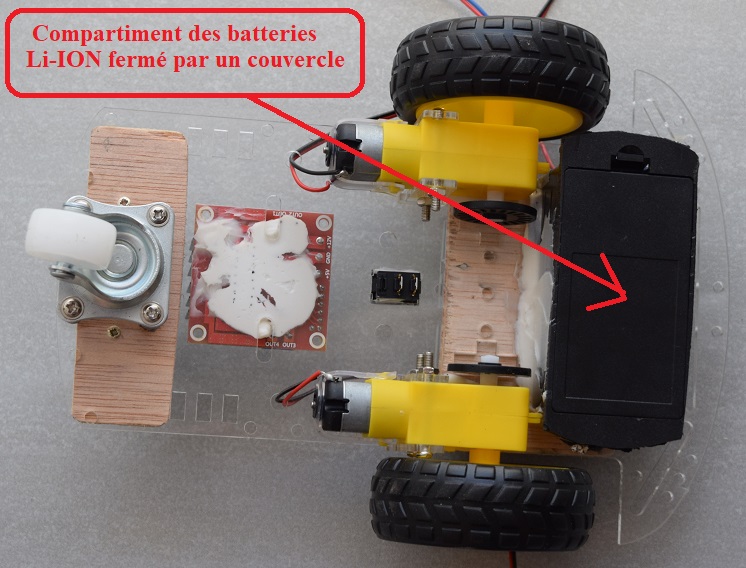
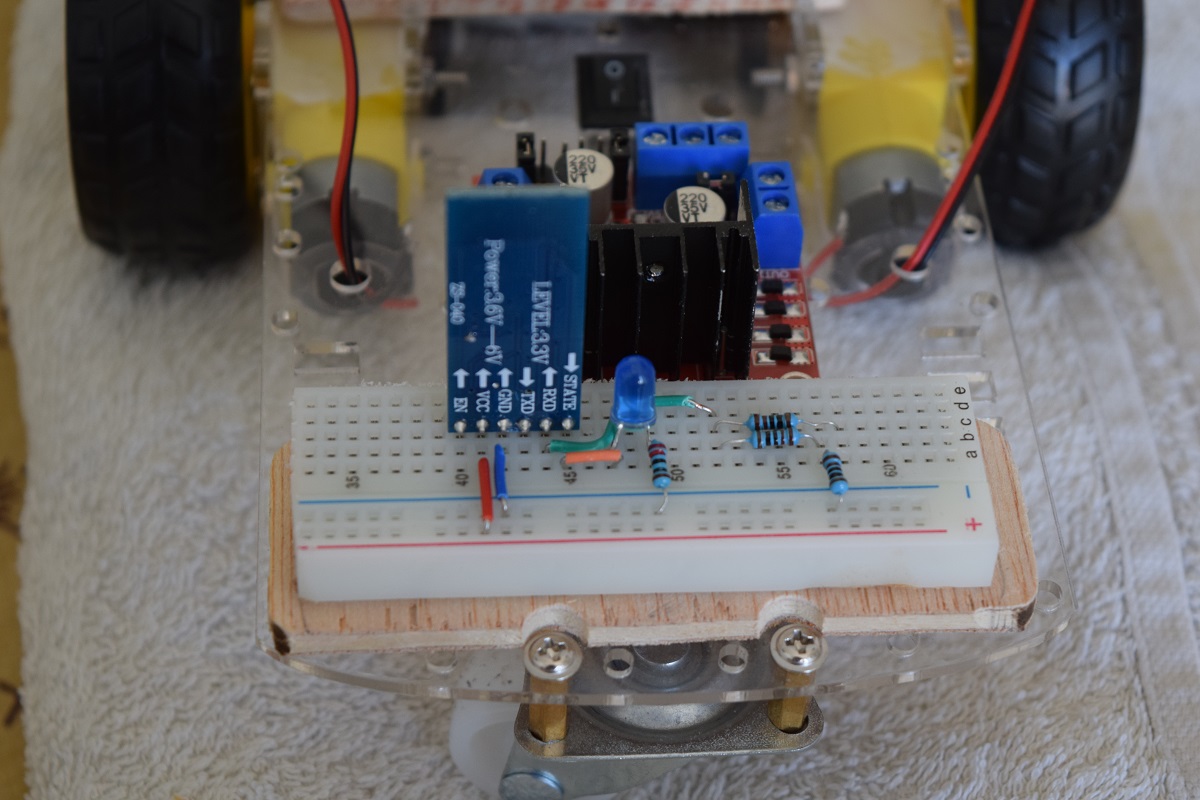
Close-up of the
connections of the Arduino Uno board placed on the front of the scooter
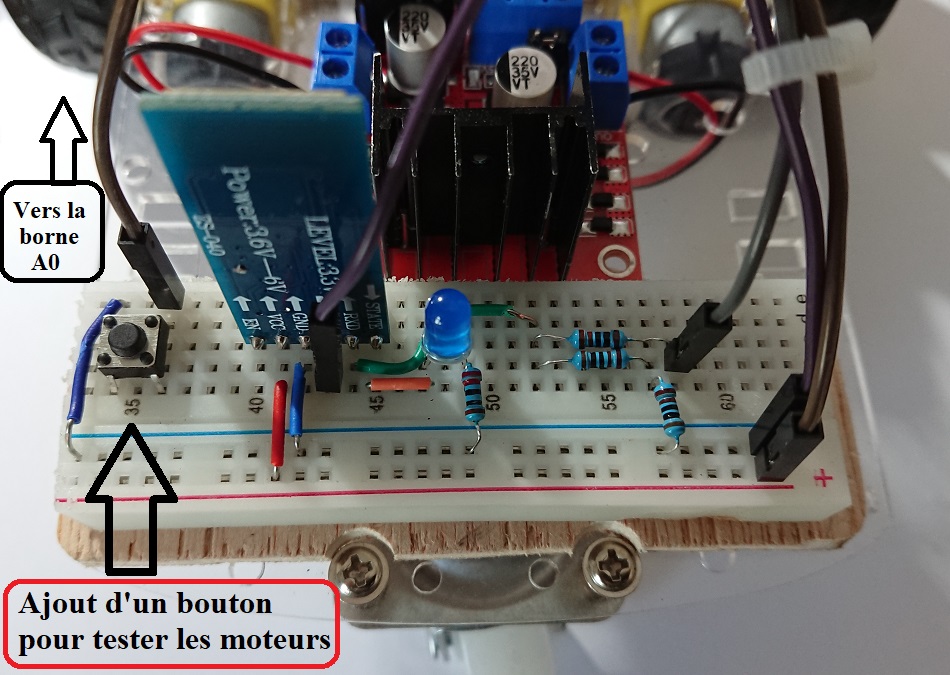
Addition of a
“Motor operation test” button on the mini-connection plate
(Pressing this push button triggers
the operating test of the 2 motors: 3 seconds in forward then 3 seconds in
reverse, even if the vehicle is not connected via Bluetooth)
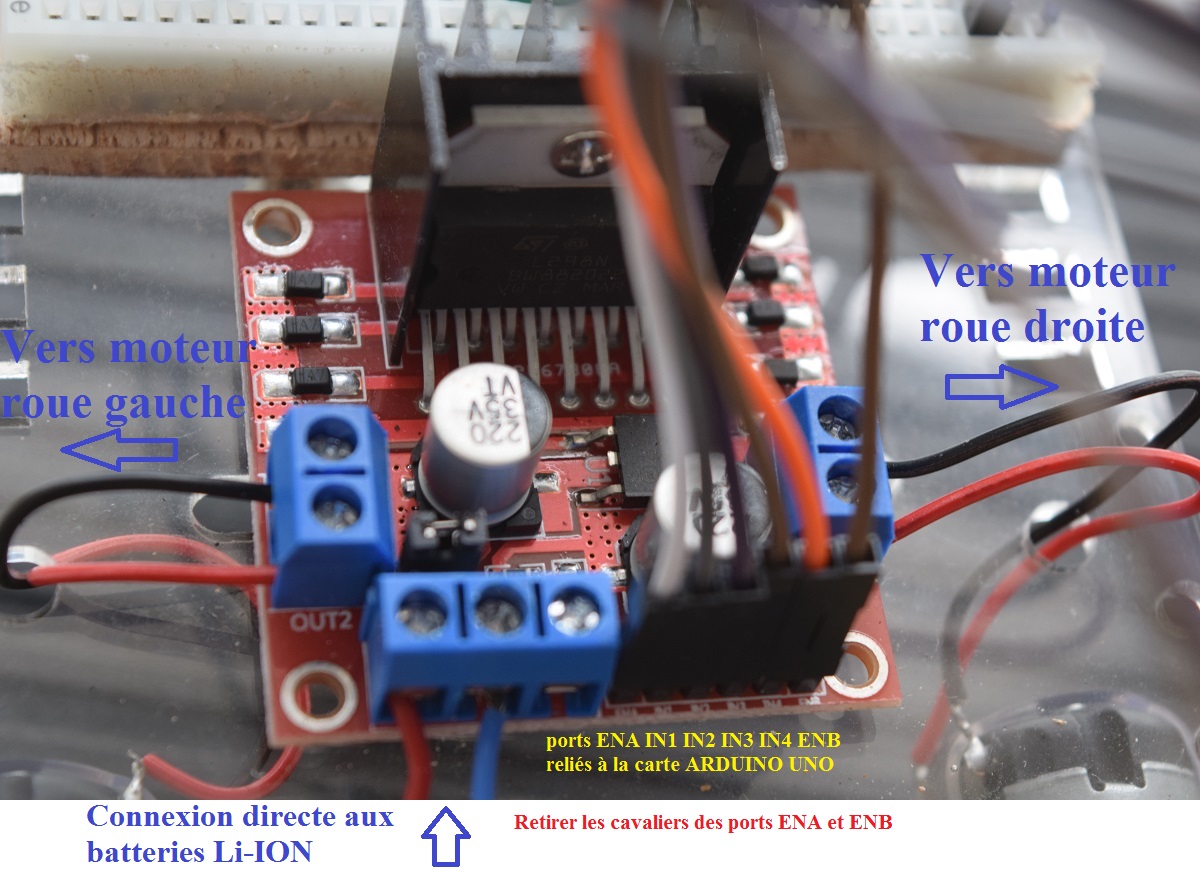
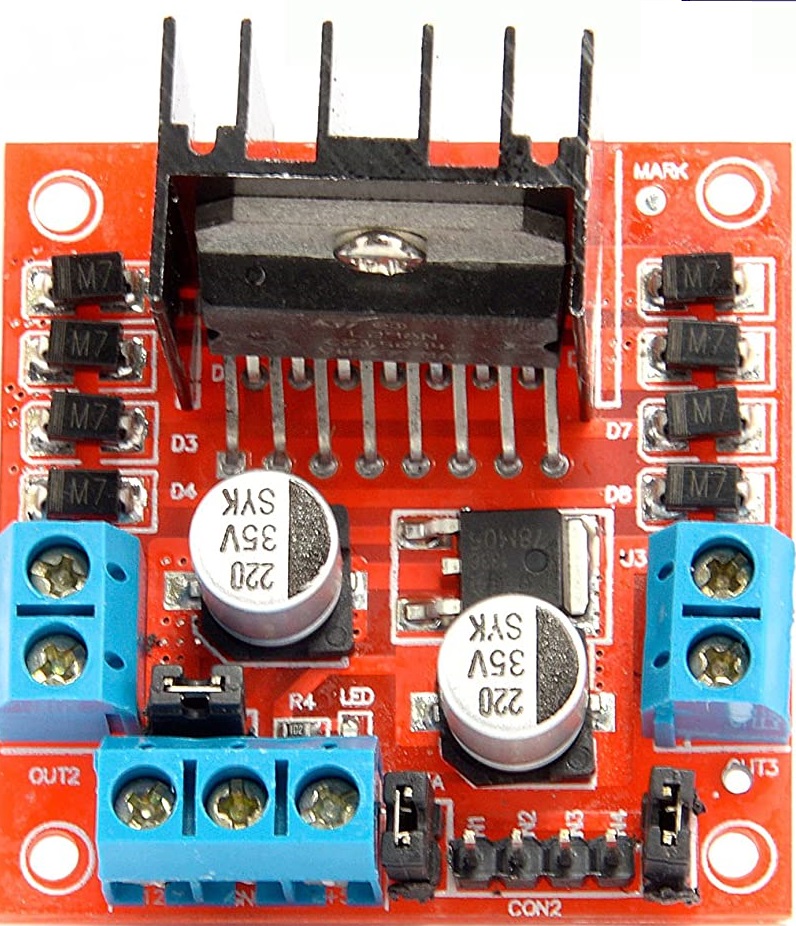
L298N module
connections
Please note that
the jumpers installed by default on the ENA and ENB ports must be removed from
the L298N module in order to allow speed variations of
the two motors.
If you leave these jumpers in place, the
motors will always run at the same speed and steering will be reduced to
forward and reverse at a constant speed.
Note: If after complete assembly and connections made, you notice system malfunctions, particularly during motor tests, do not panic. If one or both wheels move backwards instead of forwards, reverse the + and - connections to the OUT1 (and/or OUT2) outputs of the motor power supply. If the scooter turns left instead of turning right and vice versa, simply swap the connection of the cables coming from the L298N module (ENA and ENB pins) to terminals 9 and 10 of the ARDUINO UNO board. Everything should be fine...