Construire puis piloter une voiture Arduino
Build then drive an arduino car
|
|
|
|
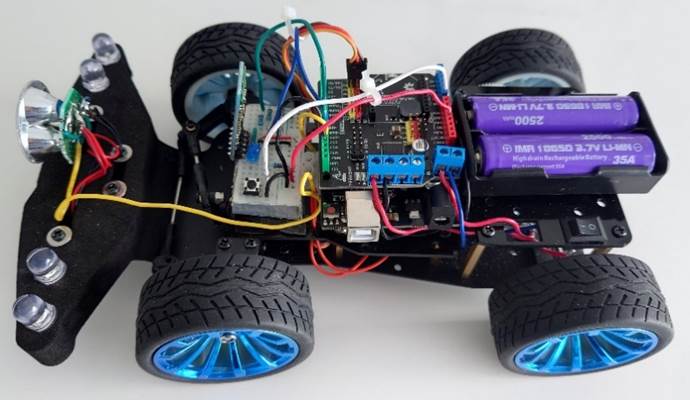
2 - Équipement
électronique n°1 Carte ARDUINO MEGA 2560 + Module L298N |
|
|
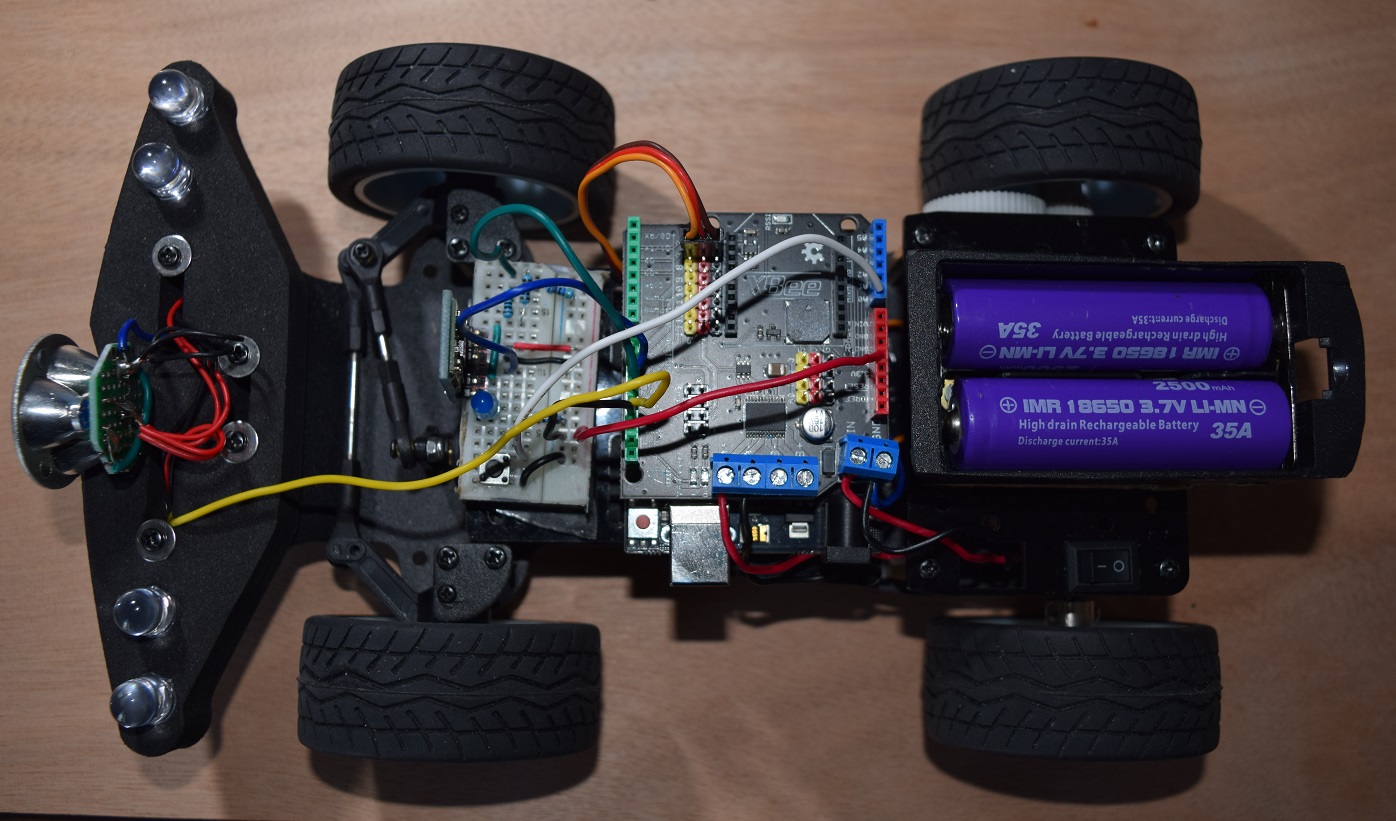
4 - Équipement
électronique n°2 Carte ARDUINO UNO + YFROBOT PM-R3 |
|
Vidéo: Essais de la voiture n°1 Arduino
Circuit autonome de la voiture n°2 Arduino
Téléchargez le livret pédagogique récapitulatif
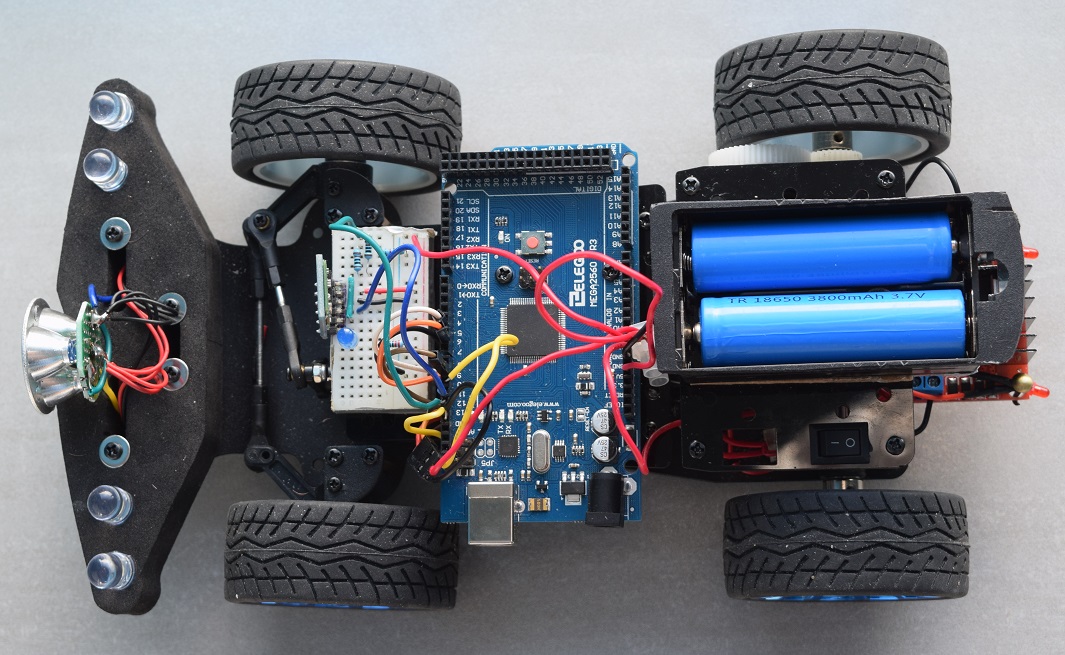
Version 1 - avec carte ARDUINO MEGA 2560 et Module L298N
Version
2 - avec carte ARDUINO UNO et Carte shield YFROBOT XBee
(Option
la plus appropriée au châssis de la voiture)